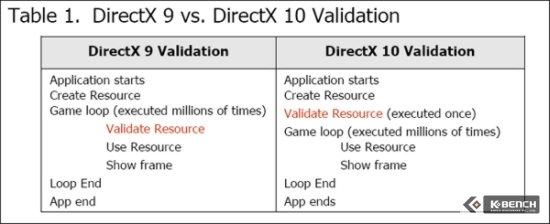
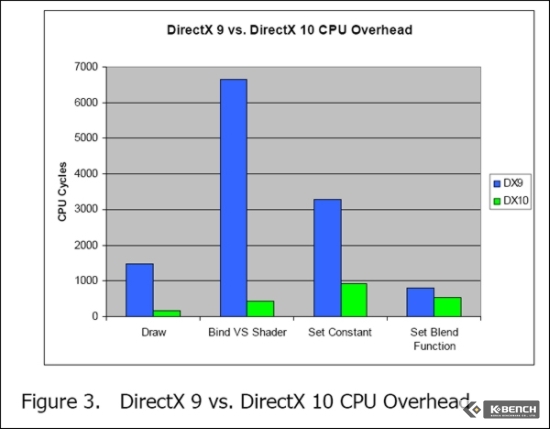
<DX9와 DX10의 유효성 루프 성능 차이>
CPU에서 진행하는 이 작업이 수 백만에서 한 번으로 줄어든 다는 것은 그만큼 CPU의 부담이 줄어든다는 뜻이다.
이와 함께 CPU의 의존률을 줄이기 위해서 3가지 새로운 기능이 추가된다. 이것들은 각각
texture array
predicated draw
stream out
이라 불리운다.
Texture array는 최고 512개까지의 텍스쳐를 저장해 놓은 구조체로써, 여기에는 세이더 프로그램이 texture array 내부에서 동적으로 텍스쳐들을 색인할 수 있는 명령어들도 포함되어 있다. Texture array는 GPU에 의해 컨트롤이 되기 때문에 다량의 텍스쳐, 즉 멀티플 텍스쳐를 관리할 때 CPU의 의존도를 줄이게 된다.
Predicated draw는 겹쳐지는 오브젝트를 처리할 때 사용하는 기능으로써, 앞쪽에 있는 오브젝트에 가려져 있는 뒤쪽의 오브젝트를 렌더링 하기는 하지만 최종적으로 보여지는 이미지에서는 효과를 제외하고 그려내는 것이다. 즉 불필요한 부분까지 세이더 처리를 하기 때문에 그만큼 자원 낭비가 이루어지는 것을 막아낼 수 있다. 이와같은 기법은 현재에도 사용되고 있지만 여전히 처리하지 말아야 할 부분까지 세이딩을 하게 된다. 이런 것을 occlusion query라 불렀으며 DX9 기반에서는 이를 CPU와 GPU가 담당했지만 DX10에서는 오직 GPU에서만 처리를 하게 된다.
Stream out은 지오메트리 또는 버텍스 세이더의 결과물을 비디오 메모리로 바로 출력하는 새로운 기능이다. 기존에는 버텍스 -> 지오메트리 -> 픽셀 세이더 파이프 라인 순서를 반드시 거쳐야했지만 stream out을 통하면 픽셀 파이프 라인을 거치지 않고 바로 출력이 가능하게 되는 것이다. 이는 DX10의 통합 세이더 아키텍쳐가 있기에 가능한 것이다.
이런 기능 등을 이용했을 경우 줄어드는 오버헤드의 양은 다음 그래프를 참조하자
4.세이더 모델 4.0 (Shader Model 4.0)
DX9에 포함된 세이더 모델 3.0과 DX10에 포함된 세이더 모델 4.0은 구조부터 다르다. DX10에 포함된 세이더 모델 4.0은 통합 세이딩 아키텍쳐(Unified Shading Architecture)라 불리우는 것이 사용되었으며 여기에는 픽셀 세이더, 버텍스 세이더 유닛과 함께 지오메트리 세이더라는 것이 추가되었다. 이로 인해서 세이더 파이프라인은 고정된 것이 아니라 개발자가 직접 프로그래밍할 수 있도록 되어 있다.
여기에서 세이더 파이프라인의 프로그래밍이란 기존의 프로그래머블 픽셀/버텍스 세이더를 말하는 것이 아니다. 세이더 유닛(스트림 프로세서)의 사용을 프로그래머가 버텍스나 픽셀 세이더로 임의 할당할 수 있다는 뜻이다. 기존에는 하나의 파이프라인에 픽셀/버텍스 세이더 유닛의 수가 고정되어 있었다.
우선은 세이더 모델 3.0과 세이더 모델 4.0의 차이점을 간단히 표로 정리해 보면,
리소스 DirectX 9 DirectX 10
임시 레지스터 32 4096
고정 레지스터 256 65,536 (16 x 4096)
텍스쳐 16 128
렌더 타겟 4 8
최대 텍스쳐 크기 4096 x 4096 8192 x 8192
와 같다.
한 번의 사이클에 처리할 수 있는 텍스쳐의 수가 DX9에서는 16개이지만 DX10에서는 128개로 늘어났으며, 멀티 렌더링 시 동시에 처리할 수 있는 픽셀 세이더의 수도 4개에서 8개로 늘어났다. 또한 텍스쳐의 크기 역시 기존 4096 x 4096에서 최대 4배가 커진 8192 x 8192까지 지원을 한다.
또한 세이더 모델 4.0에는 새로운 2개의 HDR 포맷이 추가 되었다. DirectX 9에서 사용하던 FP16이나 FP24 이외에 R11G11B10 모드와 R9G9B9+5 모드이다. R11G11B10은 레드와 그린이 각각 11bit씩을 사용하고 B는 10bit를 사용하여 FP32bit로 구성된다. FP16은 3가지 색상을 더해서 16bit가 아니라 하나의 색상에 16bit씩이다. R9G9B9+5의 경우에는 각 색상이 9bit씩을 사용하고 5bit는 공유를 한다.
DX10의 새로운 모드 2개의 특징이라면 DX9의 FP16이 부동소수점 64bit (RGB 16bit씩 + 알파채널 16bit)에 비해 저장 공간은 절반이면서도 동일한 범위의 다이나믹 레인지를 표현할 수 있다는 것이다.
그러고 보다 높은 정밀도를 요구하는 HDR의 경우에는 색상 당 32bit에 알바 비트 32bit를 더해서 128bit의 정밀도로 구현을 할 수 있다. 이전 FP16일 경우에는 64bit로 구현이 되었었다.
5.통합 세이딩 아키텍쳐 #1
세이더 모델 4.0에 새롭게 추가된 지오메트리 세이더는 단순히 CPU로부터 데이터를 넘겨받아 이를 처리하기만 하던 수동적인 입장에서 벗어나 직접 데이터를 생성하는 프로세서로써의 역할을 수행할 수 있도록 해주는 결정적인 계기를 제공한다. 기존 세이더 모델 3.0에서는 새로운 데이터를 생성하지는 못하고 오직 외부에서 넘겨 받은 메쉬(mesh)에 픽셀 단위로 세이딩 처리만 하였었다. 그러나 지오메트리 세이더를 탑재함으로써 트라이앵글을 직접 만들어 내는 작업까지 함으로써 CPU의 부담을 대폭 줄여주게 된 것이다.
이를 통해 실시간 Displacement Mapping, Stencil Shadow Extrusion, 점으로부터 Point-Sprite 생성, Motion Blur 그리고 이외에 많은 효과를 GPU에서 직접 처리할 수 있게 되었다.
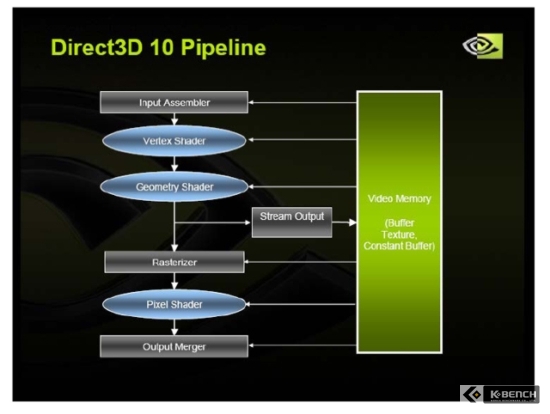
<DX10 파이프라인 구조>
지오메트리 세이더는 버텍스 세이더와 래스터라이저 사이에 위치해 있다. DX10의 파이프라인 구조는 DX9의 파이프라인과는 조금 다르다. DX9까지는 하나의 파이프라인에 버텍스 세이더와 픽셀 세이더가 존재했고 각각의 세이더에는 이를 처리하는 유닛이 있어서 이를 순차적으로 처리하였지만 DX10에서는 처리 순서가 버텍스 세이더->지오메트리 세이더->픽셀 세이더 순서로 처리가 이루어진다.
여기에서 한가지 특이한 것은 지오메트리 세이더와 래스터라이저 사이에 있는 Stream Output이라는 존재와 가상 비디오 메모리이다. Stream Output은 앞서 설명한 Stream Out 기능을 위해서 매우 중요한 역할을 한다. Stream Output을 통해 다시 Input Assembler로 보내어 지오메트리 데이터를 다시 구성할 수도 있고, 다른 세이더 유닛 그룹과 병렬처리도 가능해진다.
6.통합 세이더 아키텍쳐 #2
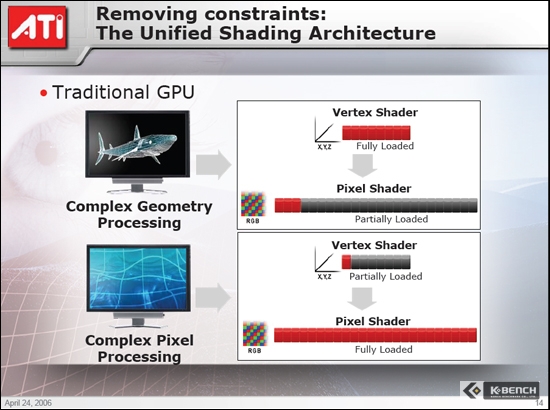
<DX9에서의 세이더 유닛>
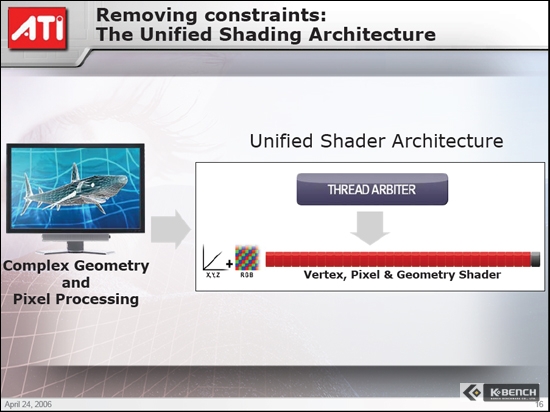
<DX10에서의 세이더 유닛>
DX9의 세이더는 위의 그림에서 보이는 것처럼 세이더의 수가 고정되어 있다. 첫 번째 이미지에 대한 설명을 하자면, 상어를 표현할 때 픽셀 처리보다 버텍스 처리를 많이 하는 것으로 되어 있다. 이럴 때 고정된 세이더의 수는 버텍스 처리 시에 과부하가 걸리는 반면 픽셀 세이더는 활용할 수 있는 만큼 다 사용하지 못하고 아이들 상태로 대기를 한다. 마찬가지로 물을 표현할 때에는 버텍스보다 픽셀 처리를 많이 한다. 이때에는 반대로 픽셀 세이더는 과부하가 걸리는 반면 버텍스 세이더는 100% 활용을 하지 못하게 된다.
이런 낭비를 막으려면, 프로그래머가 DX9에서 제어 가능한 수의 픽셀/버텍스 세이더를 감안해서 최적화하여 프로그램을 만들면 되지만, 문제는 그래픽카드마다 버텍스와 픽셀 파이프라인의 수가 다르다는데 있다. 기준이 되는 그래픽카드가 없기 때문에 그래픽카드에 따라 성능 차이가 발생한다. 반대로 콘솔 게임의 경우에는 최신 그래픽카드보다 성능이 낮은 그래픽 코어를 사용함에도 불구하고 빠른 성능을 보여준다. 이는 하드웨어의 변경이 없이 하나의 기준에만 맞춰서 게임을 만들어내면 되기 때문이다.
그렇기 때문에 PC게임->콘솔 게임 또는 콘솔->PC 게임으로의 포팅이 잘 이루어지지 않는 것이다. 하지만 DX10의 경우에는 완벽하지는 않지만 PC와 콘솔 사이의 게임 포팅이 자유롭다. 물론 동일한 API를 사용하는 Xbox 360과 G80 또는 R600 그래픽카드를 사용한다는 전제하에서이다. CPU 부분에서 조금 걸리긴 하지만 그래도 그래픽 처리 부분에서는 상당한 자유도가 부여된다.
DX10의 파이프라인 구조에서는 버텍스/픽셀/지오메트리 세이더의 수가 고정되어 있지 않고 하드웨어가 허용하는 범위 안에서 자유롭게 사용할 수 있다.
7. DX10을 통한 또 다른 게임 세계를 만난다
DirectX 10은 DirectX 7 이후 성능에 중점을 두고 만들어진 또 다른 구조의 API이다. 버텍스 세이더와 픽셀 세이더를 GPU에서 처리하게 된 DX8에도 성능을 고려하지 않은 것은 아니지만 DX10의 지오메트리 세이더 추가와 통합 세이더 아키텍쳐는 지금까지와는 전혀 다른 구조를 갖고 있기 때문이다.
Xbox360에는 ATI의 통합 세이더 아키텍쳐가 사용된 1세대 GPU가 포함되어 있다. Xbox 360 사용자들은 잘 알고 있을 것이다. Xbox 360이 제공하는 이미지의 품질을. 그러면서도 전혀 느리다거나 하지는 않다는 것도 말이다. ATI는 데스크탑 최초의 DX10 GPU를 엔비디아에게 내주긴 했지만, Xbox 360 GPU 설계를 통해 얻은 노하우를 바탕으로 2세대 통합 세이더 아키텍쳐를 만들어 R600에 탑재할 것으로 보인다. 비록 엔비디아에 밀리긴 하지만 R600의 파워는 Xbox 360을 뛰어넘을 것으로 보인다.

DirectX 10가 데스크탑에 적용되는 시점도 얼마 남지 않았다. 윈도우 비스타에 처음으로 탑재될 DirectX 10은 2자리수를 기념하려는 듯 전혀 새로운 아키텍쳐로 다가왔으며, 프로그래머들에게는 편의성을, 일반 사용자에게는 매우 높은 퀄리티의 이미지를 빠르게 볼 수 있도록 해준다.
필자가 지난 4월에 발표된 DirectX 10을 지금에서야 재정리 해서 올리는 이유는, 이어지는 엔비디아의 지포스 8800GTX 때문이다. 코드명 G80을 GPU를 탑재한 엔비디아의 지포스 8800GTX는 DirectX 10의 아키텍쳐에 호환이 되는 데스크탑 최초의 그래픽카드이다. 또한 내년 1월에 선보이게 될 ATI의 R600에서도 동일하게 적용될 것이기에 앞서 정리를 한 것이다.
이론상으로는 획기적이기만 한 DirectX10을 지원하는 엔비디아의 지포스 8800GTX. 곧 공개가 되니 기대하기 바란다.
[출처] [강좌] 통합 세이더 아키텍쳐로 진화한 DirectX 10|작성자 와우주
문제가 생길경우 삭제하겠습니다.